テール・ローターの性能と限界
訳者注:この文章は、「Flightfax」の特別版「Understanding the Performance and Limitations of the Tail Rotor in Single Main Rotor Helicopters」を要約したものです。詳細な内容については、原文を参照してください。

単一のメイン・ローターを持つヘリコプターにおけるテール・ローターの性能と限界、特に「予期せぬヨー(unanticipated yaw)」の問題について述べる。2016年以降、米陸軍の訓練課程におけるこのトピックに関する教育が削減された結果、パイロットの理解が低下し、ヨーに起因する事故が増加する傾向にある。パイロットは、テール・ローターの基礎的な理解と基本的な操縦技術に立ち返らなければならない。
1. 予期せぬヨーに関する歴史と新しい見解
従来の定説(ベル社の理論)
従来、予期せぬヨーは、LTE(Loss of Tail Rotor Effectiveness, テール・ローター有効性の喪失)として説明されてきた。これは1984年にベル社が提唱したもので、特定の風向(左前方からの風、後方からの風など)によってテール・ローターが空力的に失速し、十分な推力を発生できなくなるという考え方である。この理論は長らく、FAA(Federal Aviation Administration, 連邦航空局)の教範などの基礎となってきた。
新しい見解(エアバス社の理論)
しかし、近年の研究、特にエアバス・ヘリコプターズ社による分析では、この現象は単なる「有効性の喪失」ではなく、パイロットが認識していない「ペダル・トリム位置の変化」に起因すると指摘されている。
ヘリコプターは、ホバリング中に機首の向きを一定に保つため、メイン・ローターの回転によって生じるトルクをテール・ローターの推力で相殺している。このバランスが取れている状態のペダル位置を「トリム位置」と呼ぶ。
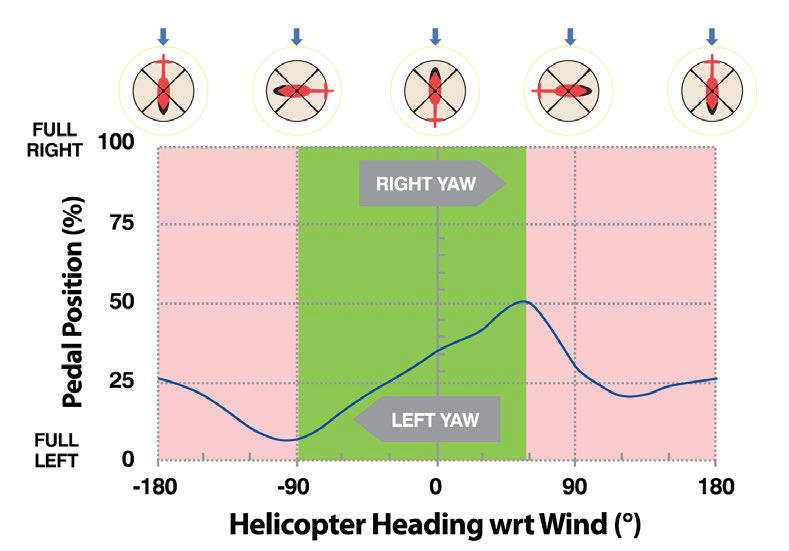
このトリム位置は、風速、風向、機体重量、高度、コレクティブ・ピッチの操作などによって常に変化する。例えば、右からの横風を受けると、テール・ローターの効率が下がるため、左ペダル(アンチ・トルク・ペダル)をより大きく踏み込む必要がある。
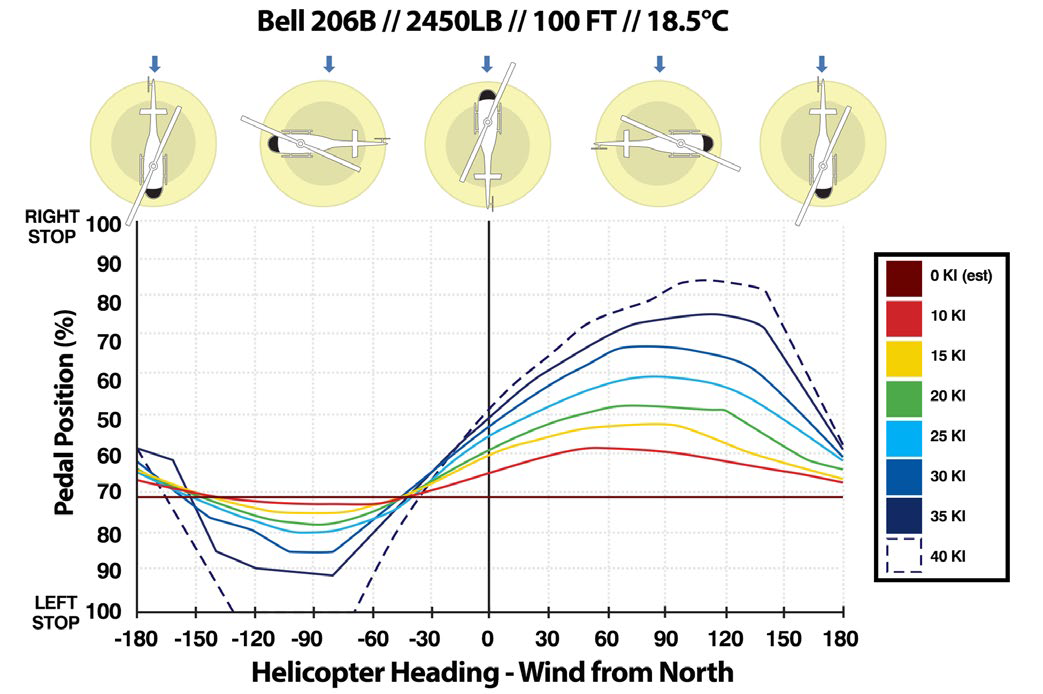
パイロットがこのトリム位置の変化に気づかなかったり、対応が遅れたりすると、機体はパイロットが意図しないヨー(特に右ヨー)を開始する。これが「予期せぬヨー」の正体であるとエアバス社は主張している。重要なのは、テール・ローターは推力を失っているわけではなく、型式証明を受けたヘリコプターであれば、回復に必要なコントロール・オーソリティ(制御能力)を持っているということである。
2. テール・ローターの基本的な航空力学
- 揚力とトルク: ヘリコプターの揚力は、ローター・ブレードを回転させることで生み出される。ニュートンの第三法則(作用・反作用の法則)により、ローターが一方向に回転すると、機体はその反対方向に回転しようとする。これが「トルク効果」である。
- アンチ・トルク: テール・ローターは、このトルク効果を打ち消すための水平方向の推力(アンチ・トルク)を生み出す小型のローター・システムである。パイロットはペダル操作でテール・ローターのピッチ角を変え、推力を調整して機首の向きを制御する。
- ローター回転数の重要性: 揚力方程式 L=CL×1/2ρ×S×V2 が示すように、揚力(推力)は空気の速度(V)の2乗に比例する。テール・ローターはメイン・ローターよりも高速で回転しているため、メイン・ローターの回転数(NR(Nominal Rotations per minute, 毎分公称回転数))がわずかに低下するだけで、テール・ローターの速度は大幅に低下し、その推力は劇的に減少する。したがって、NRの維持はテール・ローターの制御権限を確保する上で最も重要である。
3. 関連用語の定義
- LTE(Loss of Tail Rotor Effectiveness, テールローター有効性の喪失): 相対風がテール・ローターの空力特性に変化をもたらし、推力変動や有効な推力の喪失を引き起こす空力現象。
- LTA(Loss of Tail Rotor Authority, テールローター権限の喪失): テール・ローターが最大ピッチ角で作動しても、トルクを克服するのに十分な推力を発生できず、フルに左ペダルを踏んでも右ヨーが止まらない状態。
- DCM(Directional Control Margin, 方向制御マージン): トリム状態でホバリングしている際に、さらに踏み込むことができるペダルの残りの量。DCMが低いと、ヨーを止めたり開始したりするためのペダル操作の余裕が少なくなる。
4. 予期せぬヨーが発生しやすい状況と対処法
典型的な危険なシナリオ
最も危険なシナリオの一つが「ダウン・ウィンドからファイナル・アプローチへの降下・減速中の右旋回」である。この一連の操作は、以下の6つの段階で進行する。
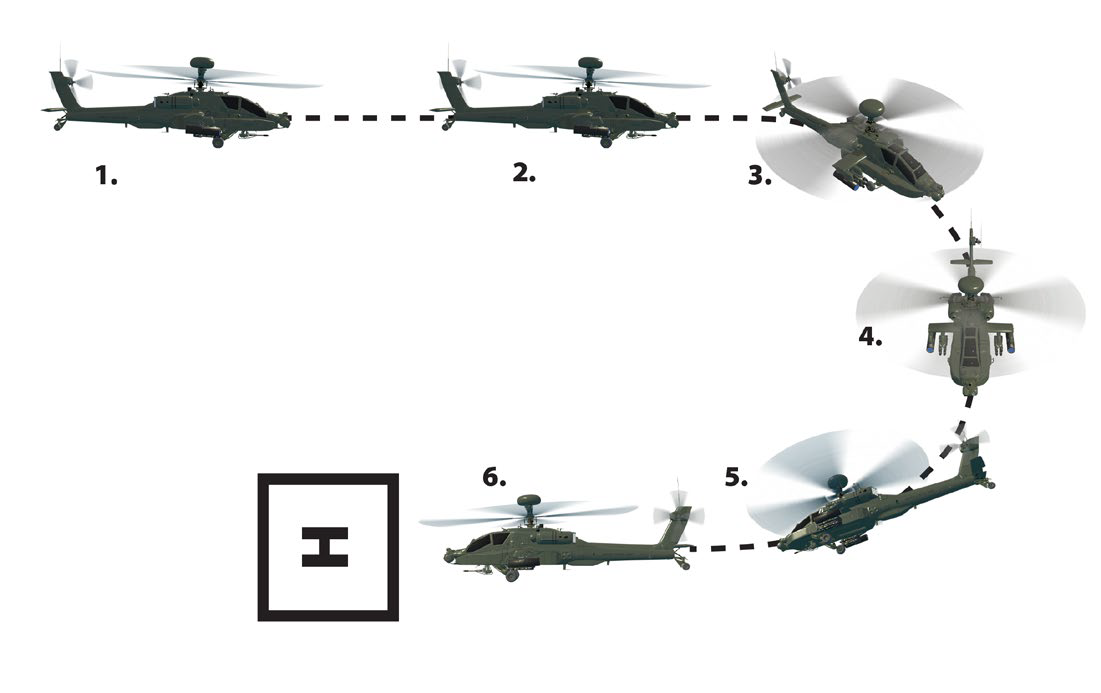
1-巡航飛行: 巡航速度では、テール・ローターは比較的安定した気流の中にあり、垂直尾翼の効果もあってペダルはほぼ中立状態にある。
2-旋回の開始: 降下・減速のために機首を上げコレクティブを下げると、トルクが減少するため、協調旋回を維持するために右ペダルを踏み込む。この段階ではまだ対気速度が高いため、垂直尾翼も有効であり、さらに右ペダルが必要となる。
3-旋回中(1): 機首上げ・低コレクティブの状態で右ペダルを大きく踏み込んでいると、機体は右からの風を受ける形になる。これによりテール・ローターの効率(迎え角)が低下し、旋回率が加速する。
4-旋回中(2): さらに、メイン・ローターの渦がテール・ローターに吹き付けられ、テール・ローターは乱気流の中で作動することになる。この状況は、右ペダル入力による低いテール・ローター・ピッチによってさらに悪化する。
5-最終進入への移行: ファイナルに向けて機体を正対させる際、対気速度は低く、機体はETLを失っている。沈下率を抑えるためにコレクティブを急激に引き上げると、トルクが急増し、大量の左ペダルが必要となる。パイロットがこの操作を予測できず、ペダル入力が遅れることが多い。
6-予期せぬヨーの発生: ステップ5での左ペダル入力が遅れたり、不十分だったりした場合(特にDCMが低い状況)、フルに左ペダルを踏んでも機体は右にヨーを始める。この場合、ヨーが完全に収まるまでフル・ペダルを保持し続けなければならない。高度に余裕があれば、前進サイクリックで対気速度を得ることも有効だが、高度の損失を伴う。
パイロットが取るべき対策
- 事前の計画: 高重量、高密度高度など、高いパワーが要求される状況を事前に把握し、特に左側からの風が予想される状況での低速飛行を避ける。
- 穏やかな操縦: バンク角を対気速度より大きくしない。可能な限り左旋回を選択する。ゆっくりとした旋回率でヨーを制御し、機体の挙動を常に監視する。
- 即時かつ適切な対処: 予期せぬヨーが発生した場合、即座に、かつ躊躇なく、必要であれば床まで一杯に反対方向のペダルを踏み込む。ヨーが完全に収まるまでペダルを戻さない。
- 状況認識: 常に風向と風速を把握し、特にOGE(Out of Ground Effect, 地面効果外)で高いパワーが要求される場合は、ペダルの残量(DCM)を意識する。
出典:FLIGHTFAX SPECIAL EDITIONS, U.S. Army Combat Readiness Center 2025年04月
翻訳:影本賢治, アビエーション・アセット管理人
備考:本記事の翻訳・掲載については、出典元の承認を得ています。
アクセス回数:2,963
管理人 へ返信する コメントをキャンセル
3件のコメント
いつも有意義な記事の翻訳と掲載をありがとうございます.
今回の記事で紹介されているエアバス社の論文は,2019年にERFで発表されたものだと思います.
エアバス社はこの研究に基づきSafety Notice(3298&3299-S-00)を発簡している他,
「Flight Physics interactive e-learning」 という自社のホームページ上のコンテンツで,わかりやすい説明(日本語版もある)をしています.
重ねまして,いつも有意義な記事をありがとうございます.引き続きフォローさせていただきます.
出典に関する情報ありがとうございます。
こちらですね。
https://dspace-erf.nlr.nl/server/api/core/bitstreams/361d1a83-d60d-4f8a-8599-23c0dfd7249e/content
今後とも、よろしくお願いいたします。
表題が冗長だったので「シングル・ローター・ヘリコプターにおけるテール・ローターの性能と限界」→「テール・ローターの性能と限界」に変更しました。