テクニカルトーク:オートローテーション(その2)
前回の記事 (その1)では、全エンジン出力の損失を速やかに認識し、ブレード・ピッチを小さくし、ローター回転数を安定させ、定常降下率を適切に設定することの重要性について説明しました。また、オートローテーション飛行の基本的な原理について確認しました。
今回の記事 (その2) では、オートローテーション飛行の最終段階について説明します。この段階では、ローター系統の回転エネルギーを利用して機体の運動エネルギーを吸収し、(機体に損傷を与えず、搭乗者に危害を及ぼさないで)安全に着陸することになります。
定常降下率を適切に設定できたならば、着陸点までの軌道に乗るように機首方向および横姿勢を制御します。また、ローター速度が制限値を超えないようにしながら、降下率が最も小さくなる対気速度(通常は、70-80ノット)を維持できるようにコレクティブおよび縦姿勢を制御します。通常は、地上40から100フィートに達した時点で、フレア操作(サイクリックを手前に引いて、機首を上げること)を行います。機首を上げると、機体の前進速度が低下し、ローターを下から上に通過する空気流が増加します。すると、ローター・ブレードの速度が増し、降下速度を減らすエネルギーが生み出されます。地上15-20フィートで、サイクリックを前方に操作して機体がおおむね水平になるまで機首を下げ、コレクティブ・ピッチを引いてローター推力を増加させて、接地時の垂直方向の衝撃が和らぐようにします。機体設計上の運用制限を超えずに着陸するためには、飛行やシミュレーター訓練を通じて操縦操作のタイミングを身に着けることが重要となります。例えば、コレクティブ・ピッチを引くのが遅れてしまうと、接地速度が大きくなり、機体が損傷したり、人員が負傷したりする可能性があります。
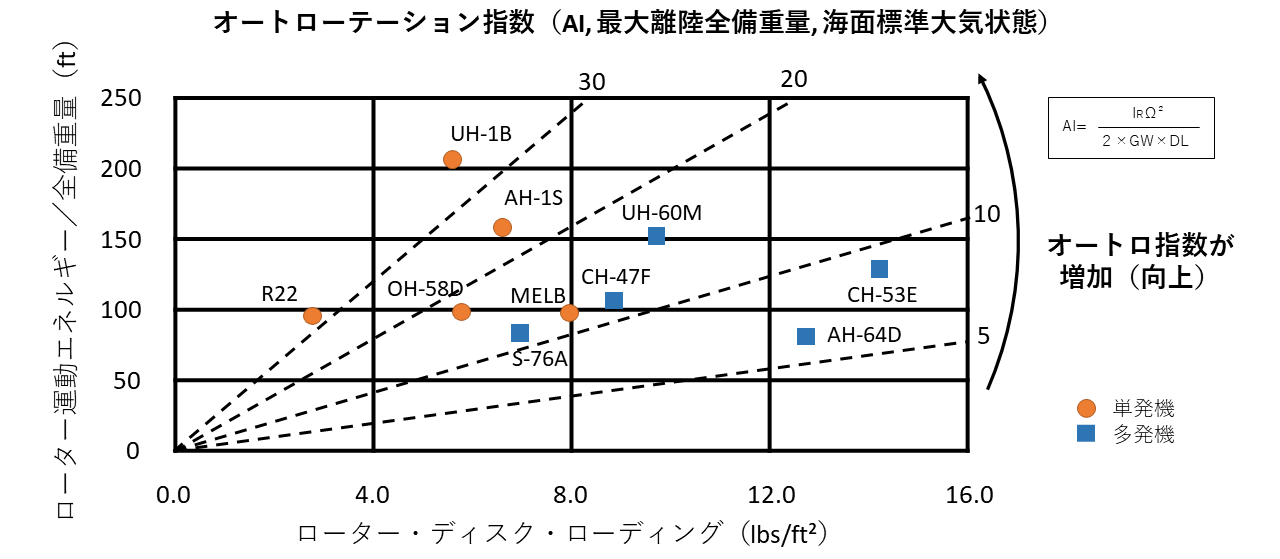
長年にわたって、さまざまなオートローテーション・メトリック(指標)の開発が続けられてきました。これにより、安全な着陸に必要なローターの極慣性モーメント(訳者注:トルクを加えたときに物体が特定の軸の下でねじれに抵抗する能力)が機体の全備重量およびローター直径に応じて推定できるようになりました。最も広く用いられているメトリックのひとつに、シコルスキー・エアクラフトのエバン・フラデンバーグが開発したオートローテーション・フレア指数(autorotative flare index)があります(AHS Journal, 1984年7月号)。オートローテーション指数(autorotative index, AI)は、図1に示すとおり、利用可能なエネルギー(訳者注:ローター運動エネルギー)をフレアから着陸までの操作に必要なエネルギー(訳者注:全備重量)で割った値に比例します。赤丸や黒四角の点は、各種単発機および多発機の単位全備重量あたりのローター運動エネルギーおよびローター・ディスク・ローディング(全備重量をメイン・ローター・ディスクの面積で割ったもの)に応じた値をプロットしたものです。原点から伸びた直線の傾きは、オートローテーション指数を表しています。この図から分かるとおり、ローター・ディスク・ローディングが増加しても、オートローテーション着陸能力(訳者注:オートローテーション指数)を同じに保つためには、単位全備重量あたりのローター運動エネルギーを増加させる必要があります。例えば、双発機であるAH-64Dが単発機であるR-22と同じ着陸性能を発揮するためには、ロータ・システムの慣性力を3倍以上に増加させなければなりません。AH-64は、全備重量あたりのローター運動エネルギーはR-22とほとんど変わりませんが、ローター・ディスク・ローディングが約4倍もあるからです。
ベル・ヘリコプターのトム・ウッドは、ベル社の「高エネルギー・ローター・システム(High Energy Rotor System, HERS)」の飛行試験について、1975年に発表されたAHSフォーラム論文の中で、高慣性、低ディスク・ローディングのローターが発揮する優れた性能について論じています。この実験プログラムに用いられたOH-58Aヘリコプターは、ローター・ブレード・チップのウエイトが2倍以上重くされ、2倍以上の極慣性モーメントが生じるように改修されていました。ウッドによれば、このシステムを用いれば、機体の高度・速度制限(height-velocity restriction, 安全なオートローテーション着陸ができない対気速度と高度の組み合わせ) をほぼ無くすことができたということです。また、「サイクリック・フレアで機首を高く上げる必要がなくなり、パイロットが地面を視認しながら着陸できるようになった」とも述べています。ローター慣性の大幅な増加は、いくつかの問題(重量の増加、ハブへの遠心力荷重の増加、およびローター・ブレードの反応の遅れによる機動性能の低下)を引き起こしますが、より重い全備重量やより高い密度高度においても、安全に着陸できるようにするための有力な選択肢のひとつとなり得るでしょう。
トーマス・L・トンプソン博士は、アラバマ州レッドストーン工廠に所在するアメリカ陸軍戦闘能力開発コマンド航空およびミサイルセンター(U.S. Army Combat Capabilities Development Command Aviation & Missile Center)システム即応維持部局(Systems Readiness Directorate)の航空力学担当チーフエンジニアである。
出典:ARMY AVIATION, Army Aviation Association of America 2022年11月
翻訳:影本賢治, アビエーション・アセット管理人
備考:本記事の翻訳・掲載については、出典元の承認を得ています。
アクセス回数:6,327
コメント投稿フォーム
6件のコメント
このグラフ(オートローテーション指数)は、すごいと思う。
ちなみに、V-22オスプレイのディスク・ローディングは、約20lbs/ft²だと言われています。
すみません。ある程度の 高さ、ある程度の速度が無いとオートロに入れないと思ってたのですが、その空域の事は何と呼んでいたのでした? はっきり決まってたなら知りたいです。
ご質問ありがとうございます。
こちらのことですよね。(UH-1の例です)
https://aviation-assets.info/wp-content/uploads/Bell-UH-1H-Iroquois-Flight-Manual.pdf#page=416
日本航空技術協会の航空工学講座「ヘリコプタ」では、この図を「高度-速度包囲線図」と呼んでいます。また、その図に示された飛行を避けるべき範囲を「飛行回避領域」と呼んでいます。この領域では、「オートローテーションに入るまでの時間と高度が保障されず、適度な降下率と前進速度を保つことができず、地面に安全に着陸できない」とされています。
今後とも、よろしくお願いいたします。
なぜ密度高度が高いところでのオートローテーションはローター回転数を上げるのですか
申し訳ありませんが、私には質問の意味が分かりませんでした。
この記事には、密度高度について「(HERSは)より重い全備重量やより高い密度高度においても、安全に着陸できる」としか書かれていません。
整備試験飛行におけるオートローテーション回転数の調整のことでしょうか?
それだとしても、試験飛行規定が手元にないので、私には分かりません。
ちなみに航空工学講座「ヘリコプタ」には、次の記述がありました。
(ピッチ角を大きくして)回転数を低く設定すれば回転に必要なエネルギは少なくてすみ、降下率は小さく抑えられる。逆に回転数を高く設定すれば降下率は大きくなる。なお、回転数はピッチ角のほかに密度高度、機体重量、飛行速度の影響も受ける。
今後ともよろしくお願いいたします。